

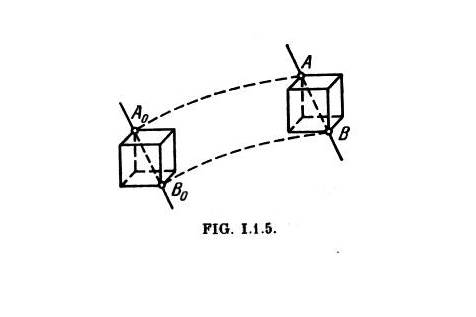
1°. Se llama movimiento de traslación de un sólido aquel, durante el cual cualquier recta asociada rígidamente a dicho sólido (por ejemplo, la recta AB, de la fig. 1.1.5) se traslada permaneciendo paralela a su dirección inicial (A0B0). Tienen movimiento de traslación con respecto a la Tierra, por ejemplo, la cabina de un ascensor, la cuchilla de un torno, la aguja de una brújula cuando su caja se desplaza en un plano horizontal, etc.

Cuando un sólido se traslada, todos sus puntos se desplazan exactamente lo mismo: en un tiempo pequeño dt, los radios vectores de estos puntos varían en una misma magnitud dr. Respectivamente, en cada instante todos los puntos del sólido tienen la misma velocidad, igual a dr/dt, y, por consiguiente, también son iguales sus aceleraciones. Por esto el estudio cinemático del movimiento de traslación de un sólido se reduce al estudio del movimiento de cualquiera de sus puntos.
En la dinámica se estudia el movimiento del centro de inercia del sólido (1.2.3.3°). Todo cuerpo sólido que se mueve libremente en el espacio tiene tres grados de libertad de traslación (1.1.2.7°), que corresponden a sus traslaciones a lo largo de los tres ejes de coordenadas.
2°. El movimiento de un sólido durante el cual dos de sus puntos A y B permanecen fijos, se llama rotación (o movimiento de rotación) del sólido alrededor de un eje fijo . La recta en reposo AB recibe el nombre de eje de rotación del sólido. Al girar alrededor del eje fijo, todos los puntos del sólido describen circunferencias, cuyos centros se encuentran en el eje de rotación y cuyos planos son perpendiculares a él. Este tipo de movimiento, con respecto a la Tierra, lo efectúan, por ejemplo, los rotores de las turbinas, de los motores eléctricos y de los generadores sujetos a ella.
El sólido que gira alrededor de un eje fijo sólo tiene un grado de libertad (1.1.2.7°). Su posición en el espacio se determina totalmente por el valor ϕ del ángulo de rotación a partir de una posición determinada (inicial).
3°. Para caracterizar la rapidez y el sentido de la rotación del sólido alrededor del eje sirve la velocidad angular. Se llama velocidad angular el vector o, igual numéricamente a la primera derivada del ángulo de rotación ϕ , respecto del tiempo t, y dirigido a lo largo del eje de rotación fijo, de tal modo que desde su extremo se vea que el sólido gira en sentido contrario al de las agujas del reloj se llama velocidad sectorial.
Aceleración
1°. Para caracterizar la rapidez con que varía el vector velocidad de un punto se introduce en
amed= Δv/Δt
En este caso el ángulo de rotación del sólido depende linealmente del tiempo: ψ= ωt
4°. Un punto arbitrario M de un sólido que gira alrededor de un eje fijo OZ con la
velocidad angular ω , describe una circunferencia de radio p con centro en el punto O’ (fig.
1.1.7). La velocidad v del punto M, a diferencia de la velocidad angular del sólido, se llama

Aquí r = OO’ + ρ es el radio vector del punto M trazado desde el punto O del eje de
rotación tomado como origen de coordenadas.
rotación tomado como origen de coordenadas.

5°. Se llama período de rotación el intervalo de tiempo T durante el cual el sólido, girando uniformemente con la velocidad (o, da una vuelta completa alrededor del eje de rotación es decir, gira un angulo ( Ψ=2π) T=2π/ω
La frecuencia de rotación n=1/T=ω/2π indica el número de vueltas (revoluciones) que da el sólido en la unidad de tiempo, cuando la rotación es uniforme y la velocidad angular es w.
6°. El movimiento de un sólido en el cual uno de sus puntos permanece fijo, se denomina rotación del sólido alrededor de un punto fijo. Por lo general, este punto se toma como origen de coordenadas del sistema de referencia en reposo. En la rotación alrededor de un punto fijo todos los puntos del cuerpo de mueven por superficies de esferas concéntricas cuyos centros se hallan en el punto fijo.
Este movimiento del sólido se puede considerar en cada instante como
rotación alrededor de cierto eje que pasa por el punto fijo y recibe el nombre de eje instantáneo de rotación. En el caso general, la posición del eje instantáneo de rotación varia tanto con respecto a un sistema de referencia fijo, como con respecto a un sistema de referencia solidario del sistema que gira.
rotación alrededor de cierto eje que pasa por el punto fijo y recibe el nombre de eje instantáneo de rotación. En el caso general, la posición del eje instantáneo de rotación varia tanto con respecto a un sistema de referencia fijo, como con respecto a un sistema de referencia solidario del sistema que gira.
¿Qué es la máquina de movimiento continuo?
El aparato de movimiento continuo o móvil perpetuo es una máquina que realiza un trabajo continuo sin necesidad de energía exterior que la impulse. Una de estas máquinas lograría crear energía de la nada, sería la fuerza de trabajo más barata que uno pudiera imagina. Por esto es entendible que tantas personas alrededor de la historia hayan tratado de conseguirla.
Su historia
La idea la máquina de movimiento continuo tiene su origen probablemente en el siglo XII, en la India. Desde ahí llegó a Europa en el siglo XIII gracias a los árabes. Es muy probable que éstos, muy necesitados en sus países de mano de obra para el riego de los campos buscasen muy, una manera de propulsar sus numerosos elevadores de agua. Los europeos medievales, según el historiador de la técnica Friedrich Klemm, perseguían una finalidad más ideal: un movimiento circular continuo como imagen terrestre del movimiento divino de las esferas celestes, profanando "el pensamientoaristotélico, que reservaba los movimientos circulares eternos a cielos".
Los móviles perpetuos de la Edad Media eran en su mayoría, conforme al estado de la técnica por entonces, ruedas con barras giratorias o tubos en parte rellenos de mercurio. O sistemas de tubos donde fluía agua en circuito cerrado. Los inventores creían que podían conseguir un desequilibrio constante: las barras giratorias o los recipientes del líquido mantendrían siempre el baricentro de la rueda a un mismo lado del punto de giro, que descendería continuamente mientras la rueda girase. Si esto fuera posible, el mecanismo convertiría la energía potencial del campo gravitatorio en energía cinética y generaría sin cesar trabajo. Pero el baricentro de la rueda se alejará, como mucho, del centro de giro hasta donde le permitan las masas; además, después de una vuelta entera, si el mecanismo, conforme a la intención de quienes lo idearon, se encontrase de nuevo en la situación inicial, el baricentro volvería también a su altura original.










